
AYUCR
Interfacing With a Servo
Introduction
With version 1.7 of the AYUCR Camera Controller firmware it is possible to use a servo to trip a camera shutter. There are two ways interface a servo to the controller. One requires no modifications to the stock controller but requires a simple driver circuit. The other requires no external circuitry but involves a simple modification to the controller. Both methods are discussed here.
A servo is a positional motor used in RC aircraft and cars. The position of the shaft is dermined by a PWM signal that varies from 1ms-2ms in width with a duty cycle of 20ms. A stardard servo has three leads, +4.8V, GND (-) and a signal lead. The connectors and wire colors vary depending on the manufacturer but the signaling is standard.
External Driver
The stock AYUCR Camera Controller can drive a servo with the addition of a simple driver circuit. The driver circuit uses the on-board relay to feed a series of pulses to the servo signal line. In the schematic below J1 is a Futaba-style servo connector and J2 is the shutter/power connector on the controller. All the circuit does is use the onboard relay to switch +5V to the servo signal input. A pull-down resistor is in place to prevent the servo input from floating when the relay is open. The servo should be powered externally with a suitable power source for driving servos.
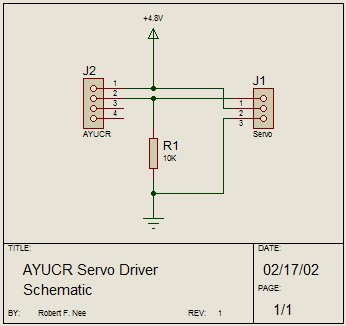
External Driver Circuit for Servos
The chart below for J1 shows the pinout for a standard Futaba brand servo. Other brands may vary.
| Pin Number | Wire Color | Function |
|---|---|---|
| 1 | White | Signal |
| 2 | Red | +4.8V |
| 3 | Black | GND (-) |
The next chart shows the AYUCR Camera Controller J2 pinout. Pin 1 corresponds to the square solder pad on the circuit board. Note that pin 3 is connected to the input side of the on-board voltage regulator. If an on-board battery is used this will be 12V which may damage a servo.
| Pin Number | Pin Name |
|---|---|
| 1 | Shutter + |
| 2 | Shutter - |
| 3 | +V |
| 4 | Gnd |
Internal Driver
An alternative to using an external servo driver is to modify the AYUCR Camera Controller to drive the servo directly. You might choose this method if you will only be using servo control and want a simpler implementation. With this modification to the controller you will no longer be able to use the controller in non-servo mode.
Step 1: Remove the 6 pin relay from the camera controller. You may unsolder the chip or simply cut the leads but make sure not to damage any of the traces on the board.
Step 2: Solder a jumper wire from pin 1 (square pad) to pin 6 where the relay used to be. This routes the shutter signal from the processor directly to J2 pin 2.
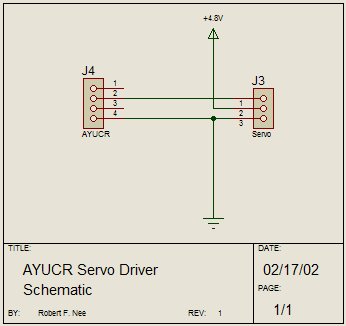
Internal Drive Schematic
Refer to the above schematic for wiring to the servo. J2 pin 2 now connects directly to the servo signal line. It is important to note that you must connect the GND of the external servo power source to J2 pin 4. This provides the controller and servo with a common ground reference.