
AYUCR
Non-Pyro Deployment
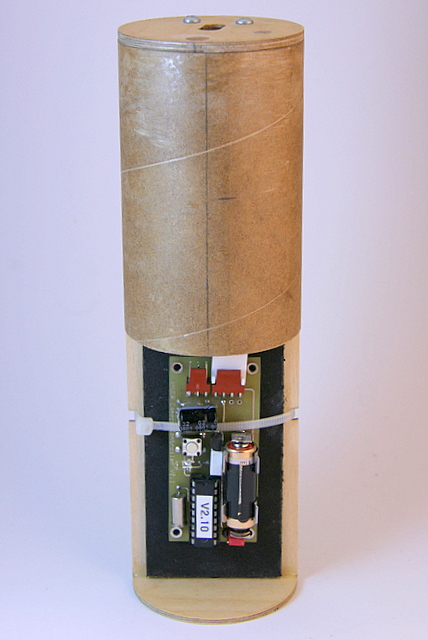
Electronics Module showing the AYUCR Camera Controller mounted
Introduction
In the July/August 2005 issue of Sport Rocketry Editor Tom Beach describes a rocket he built named Eject-O-Matic. The rocket uses a R/C servo and a spring loaded piston to deploy the parachute rather than the typical black powder ejection charge. Although more complex than a standard recovery system non-pyro deployment does have it's advantages. There's no black powder residue to deal with and any regulatory issues with BP are avoided. Tom's rocket uses a commercial timer and a custom servo control circuit to detect liftoff and control the servo. This works great but but the AYUCR camera controller can handle all this itself and use less payload space. It's also cheaper.
I built my own version of Eject-O-Matic in oder to demonstrate what the AYUCR Camera Controller can do. I stuck very closely to Tom's design. It is elegant, simple and it works. I did upscale it to 2" tubing but it can be done using BT-60 like Tom did. I won't describe the whole project here but will instead describe how my version differs. Please refer to my article on interfacing the Camera Controller to a servo for a discussion of the electrical connections.
Electronics Module
The first two picture shows the electronics module. It consists of a tube coupler that holds the servo and latch mechanism and a plywood carrier that holds the Camera Controller and the battery pack for the servo. The battery and Camera Controller are held in place with a tie wrap. The second two pictures show the servo and latch Mechanism. I used a small rubber band to pull the latch into the neutral position. I also mounted the servo to the same tube coupler cap as the latch. When the servo rotates it pushes the latch and will disengage the catch that goes throught the center of the cap releasing the piston.
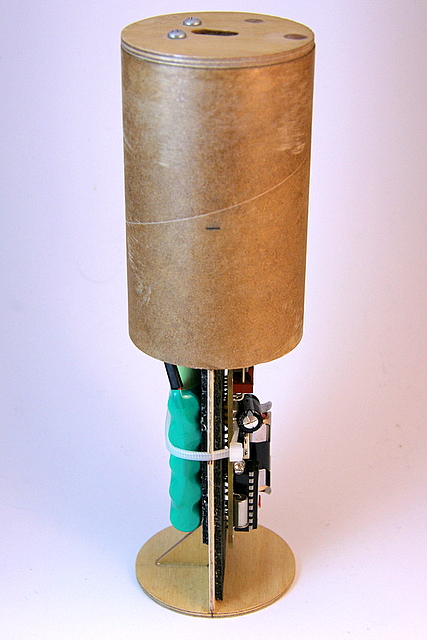
Electronics Module side view
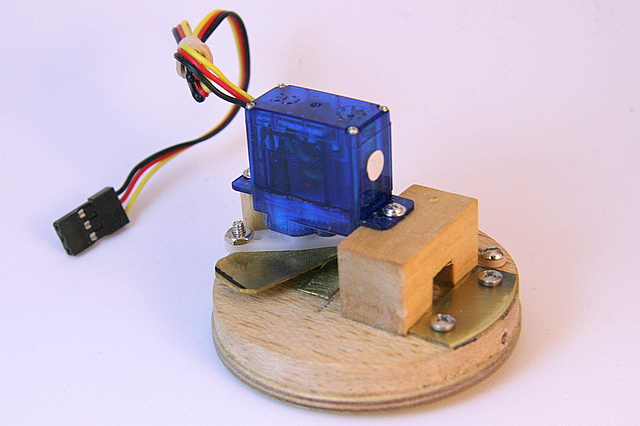
Deployment Module showing the AYUCR Camera Controller mounted
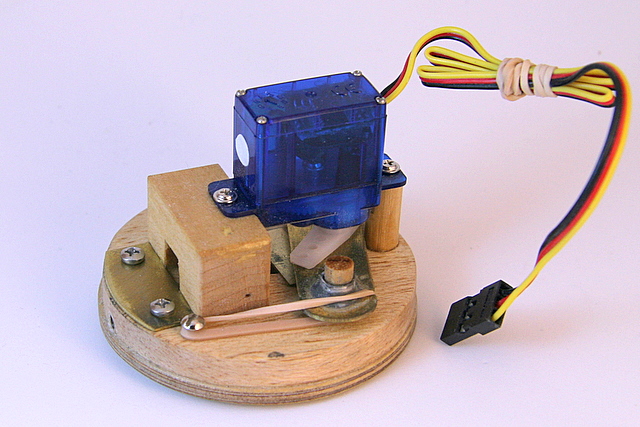
Rubber band return on latch
Configuration
Below are the flight parameters used for controlling the servo via.
| Flight Parameter | Value |
|---|---|
| Launch Detect | 20/100 sec |
| Launch Delay | 70/10 sec |
| Number of Groups | 1 |
| Number of Pictures | 3 |
| Picture Interval | 10/10 sec |
| Group Interval | 0 sec |
| Shutter Speed | 5/10 sec |
| Servo Mode | 150 |
| Keepalive Interval | 0 |
In this configuration the delay time to apogee is controlled by the launch delay. It is set to 70/10 seconds (7 seconds). The controller is set up to detect lift off, wait 7 seconds and take three "pictures" at one second intervals. We're obviously not trying to take pictures, just have the Controller actuate the servo from zero to about 60% three times. It does this to hopefully unstick a stuck latch. These settings can be tweaked for your own project.
Conclusion
I flew this rocket twice at the June 2007 METRA launch. It worked perfectly both times and it was a real pleasure to not have to clean BP residue, deal with wadding or worry about cinged chutes. I'd like to adapt this to HPR rockets using CO2 for deployment some day.
Hopefully you can use this article and The Eject-O-Matic article to build your own non-pyro rocket. Let me know if you do.